Improving drivable model cars with safety features
Ethan Tang, Evan Sang
Queen Elizabeth High School
Grade 7
Presentation
No video provided
Problem
There tends to be more car accidents in more populated areas, largely due to increased traffic congestion with more cars on the road. So with increasing urbanization, traffic congestion will become a larger problem in more places. This is a problem because the more cars you have on the road, the more likely there is to be crashes. One method to avoid these problems is to predict where traffic congestion will happen and try to take measures against it, which is not the focus of our project. Automated speed control and braking is the other method for dealing with traffic congestion, which is the focus of our project. Thus, we want to make a drivable model car that can simulate some of today's car safety features.
Method
Most modern vehicles use a combination of distance sensors and computer vision. A simpler way to achieve this is to use a combination of an ultrasound and laser sensor to measure the distance to an obstacle and adjust the speed accordingly. Having 2 sensors is important because of a concept called redundancy.
While most of the time having just 1 sensor will do, there are times when one or the other isn't effective, meaning that you need a failsafe, since having it work every time is very important in this application. For example, a laser sensor may fail to detect a transparent material, but an ultrasound sensor can detect it, acting as a failsafe.
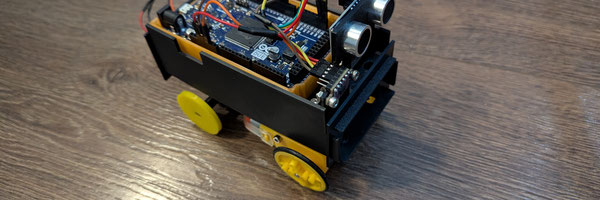
For our project, we used an Arduino Due board for control, 2 5V TT motors to drive the wheels, a motor driver model TB6612FNG to power the motors (since you can have 1 more power source), an ultrasound sensor model HC-SR04, and a ToF laser sensor model VL53LOXV2. For power, we have a 9V battery that powers the control board and a battery pack with 4 AA batteries to power the motor driver. We need both batteries, or else we won't have enough power for everything. We chose the TT motors since they have all the functionality we need, since they can go both directions and have speed control, and because they have a suitable speed-to-torque ratio. All other parts are 3D printed.
To start the car, you need to wave your hand in front of the sensor, which will cause the motors to start running. In the code, there are multiple steps to make this happen. There has to be a long, then short, then long distance detected by the sensor, 0.5 seconds apart. When the car is running, it will stop when a distance below 500mm is detected by one of the motors, and it will not continue if the obstacle is moved away, but it will still start again if you wave something in front of it.
Analysis
In the building and early testing phase, we encountered some issues, and I think the solutions were very instructive. We noticed that the car would consistently turn left, so to make it run straight, we would make the left motor run faster so it would turn right more, countering the left drift. Another issue we encountered was that when an obstacle was detected but moved away, it would trigger the starting mechanism. While this is acceptable, it's not the intended behavior. So to fix it, it has to detect a long distance at first, then a short distance, then long in a certain period of time to start, so it still detects a hand wave.
We tested 3 different materials to see how well the sensor can detect them. The results in distance stopped away from obstacle were very consistent, except for the curved glass where it would sometimes stop earlier. This was likely because the light reflected oddly since the glass was slightly reflective which would mess up the laser sensor reading. However, in the angle test, the field of view was quite inconsistent since sometimes the ultrasound wouldn't detect the obstacle sometimes, and the ultrasound has larger FOV. This was likely because the sensor wasn't powered properly or because it was pointed incorrectly since the mounting wasn't very solid.
Conclusion
With both sensors in place, we can detect a variety of materials that a single sensor might struggle with. This is why having redundancy is so important, since it worked every time, though if you have only 1 sensor, it might fail, and you would end up crashing. In the material test, the results were very consistent in the sense that they stopped at the same distance every time, thanks to the redundancy. However, in the angle test, the field of view was quite inconsistent since sometimes the ultrasound wouldn't detect the obstacle sometimes, and the ultrasound has larger FOV. This was likely because the sensor wasn't powered properly or because it was pointed incorrectly since the mounting wasn't very solid. One thing we could do in the future is we could make it turn when an obstacle is detected so it can solve mazes and such.
Citations
Berhanu, Y., Alemayehu, E., & Schröder, D. (2023). Examining Car Accident Prediction Techniques and Road Traffic Congestion: A Comparative analysis of road safety and prevention of world Challenges in Low-Income and High-Income countries. Journal of Advanced Transportation, 2023, 1–18. https://doi.org/10.1155/2023/6643412
Gawande, G. P., Gavhale, S. V., Zariye, I. A., Ritpurkar, S. P., & EXTC Department, AVBIT, Pawnar (WARDHA), Maharashtra (INDIA). (2014). Review of speed control and automatic braking system. In International Journal of Engineering Research & Technology (IJERT) (Vols. 3–2). https://d1wqtxts1xzle7.cloudfront.net/105490765/review-of-speed-control-and-automatic-braking-system-IJERTV3IS20447-libre.pdf? 1693799780=&response-content-disposition=inline%3B+filename%3DReview_of_Speed_Control_and_Automatic_Br.pdf&Expires=1769822853&Signature=ZpEuMdOnoXXLuGr-MJoggpy4eUV9CuYyGQkZdnRelhyoapesAW9CCG1FKPCY2sKyvHcq5Y66l4j92LOeaBmziIMhaoLr0x6MLMmZYGfeVkWRWCpUb6Xr2TrQ5QgvGuN160QjOdm01jsBZXukM4N09pUePnYaGvgszbDCbT\~aXtGb8lZWq2EdEAtzDpHJlfZel1-zEs8rdySBW0VMmXspaQaTht7pIYO63xuKO8KnxokxTfoqW10QWNSv\~97k\~vFVwnhr8VRHJGACigjjxyd0eGf4PjxiYanIVPDGwIw2gAdzhyFHZxkEyRvseXXZE-R6qzgMBc31i9R9ru4vX-V8OQ__&Key-Pair-Id=APKAJLOHF5GGSLRBV4ZA
Butete, W. (2015). AUTO CRASH AUTOMOBILE EVASION SYSTEM - FULL PROJECT. Mmust. https://www.academia.edu/15252036/AUTO_CRASH_AUTOMOBILE_EVASION_SYSTEM_FULL_PROJECT
Acknowledgement
I would like to thank my dad (Evan's) for helping us get the parts we needed and helping with the wiring by soldering and splicing the wires we need as well as teaching us a lot of the skills we needed. For research, I would like to thank the people who wrote the research papers we read, as well as the people behind Google Scholar and Academia for allowing us to find the papers.