Nanorobots targeting Plaque in Aorta, Coronary, And Carotid Arteries: A Triple Approach To Preventing Heat Attacks
Meghna Shanmugam, Pallavi Shanmugam
West Island College
Grade 9
Presentation
Hypothesis
HYPOTHESIS: A nanorobot can be guided through a fluid-filled tube and directed toward simulated plaque in a magnetic field because nanorobots are made of magnetic material and can be steered in an externally generated magnetic field of appropriate strength.
1. The strength of the magnetic field is inversely proportional to the nanorobot steering time.
2. The viscosity of the medium is directly proportional to the nanorobot steering time.
3. The distance of the magnet from the nanorobot is directly proportional to the nanorobot steering time.
Research
RESEARCH:
Cardiovascular diseases are the leading cause of death worldwide. Atherosclerosis is a condition in which plaque builds up inside arteries, thereby restricting blood flow. Atherosclerotic plaque in the coronary arteries increases the risk of a myocardial infarction, while plaque in the ascending aorta and the carotid arteries increases stroke risk.
Nanorobots are tiny devices that could navigate inside blood vessels, break down plaque, or deliver drugs directly to blockages, thereby offering a non-surgical, targeted approach to treat atherosclerotic plaque. They could be controlled from outside the body using magnets or carry drugs directly to the plaque. This project models how magnetic nanobots could be steered within arteries and target plaque.
Variables
VARIABLES:
- Independent variables: 1) Magnet strength 2) Magnet distance 3) Fluid viscosity
- Dependent variable: Speed of the nanobot reaching plaque
- Controlled variables: Tube size
Procedure
PROCEDURE:
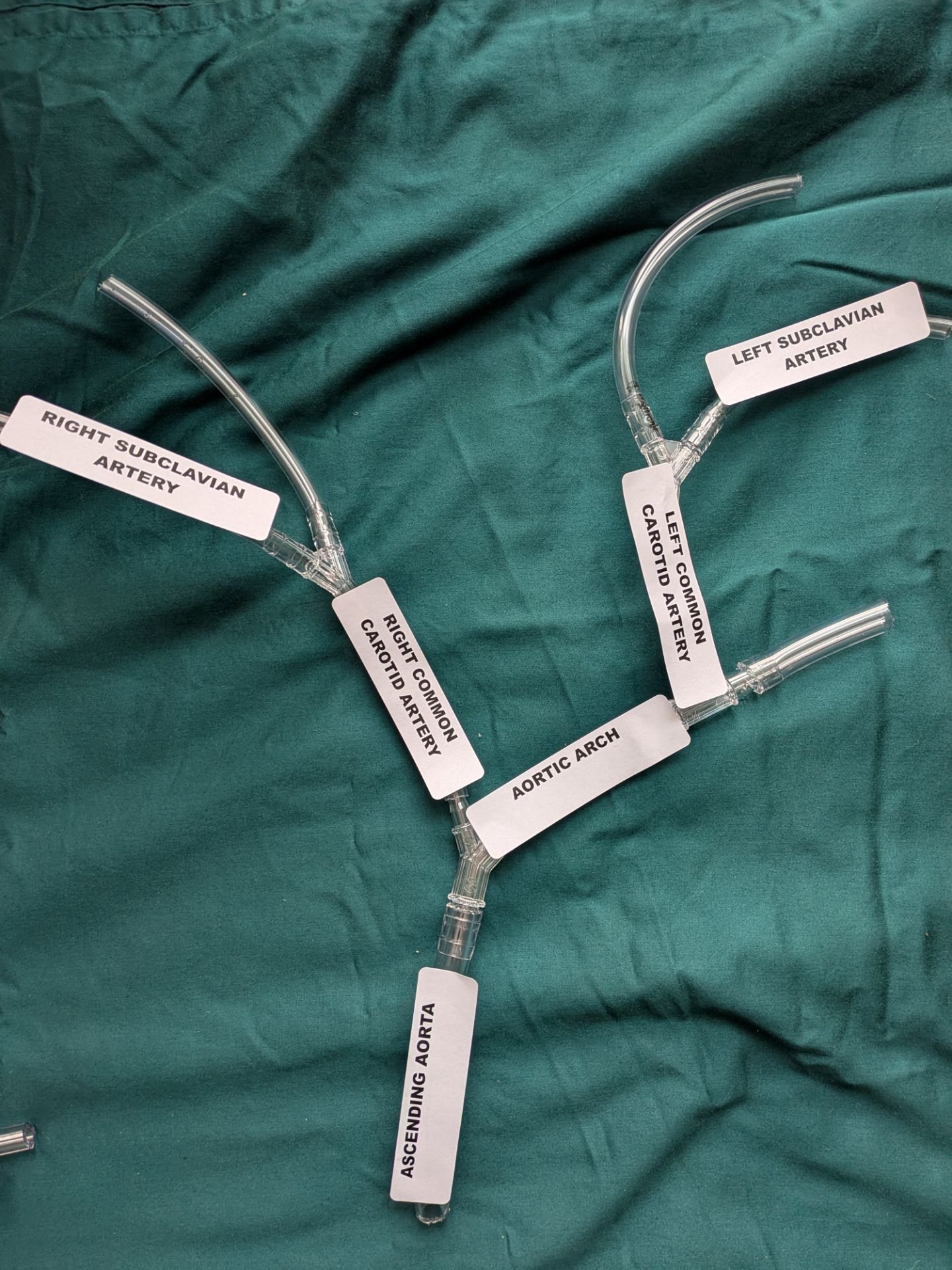
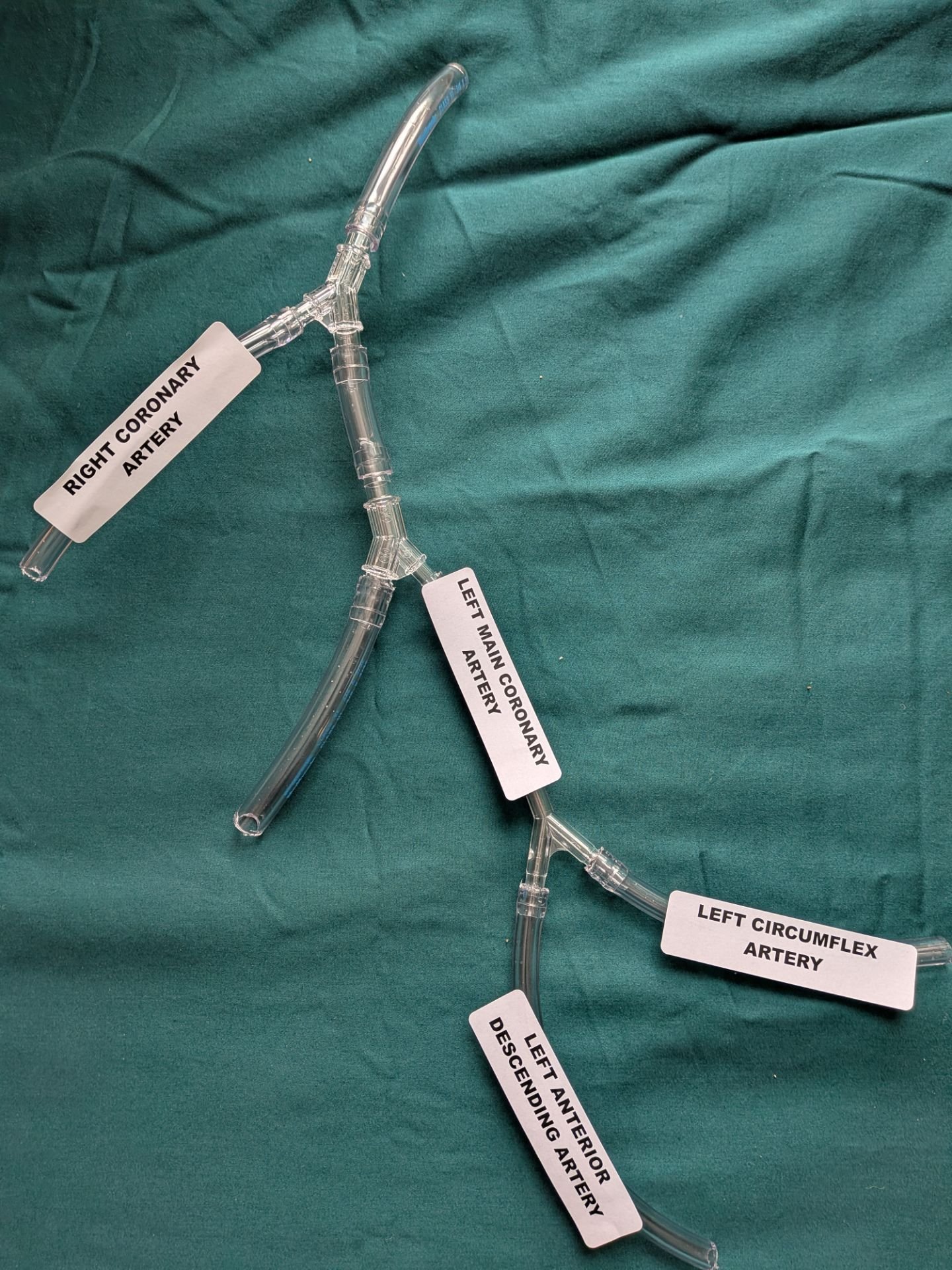
We used clear PVC tubes (of different diameters to represent the aorta, the coronary arteries and the carotid arteries) spliced from cardiopulmonary bypass circuits to represent an artery. All experiments were performed using standard ½-inch PVC tubing.
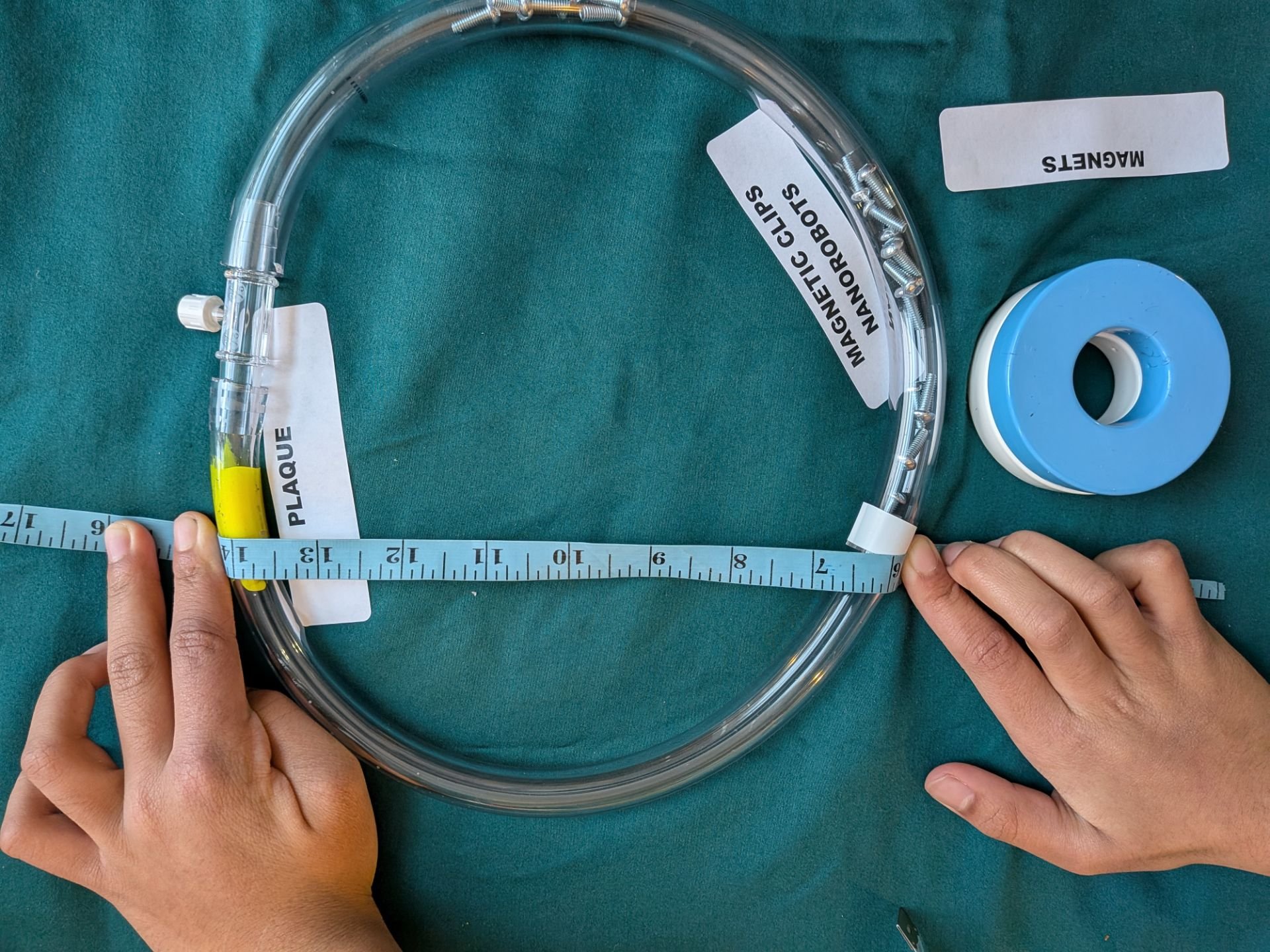
Small blobs of clay (red and yellow) were attached to the inner surface of the tube to simulate atherosclerotic plaque. An orange marker was placed at a distance of eight inches from the simulated plaque. This was the distance that the nanorobot would traverse during each experiment.
The tube was filled with air, water, apple juice, dish soap and laundry detergent. Air was used as the baseline medium, and the other fluids were used to study the effect of viscosity on the time that it took to steer the nanorobot.
After experimenting with several candidates, we chose a Paulin #8-32 x 2-1/2-inch round socket - headed plated steel screw in the tube to represent the nanorobot. Magnets of 50 Gauss, 90 Gauss, 2 x 90 Gauss and 3 x 90 Gauss, as well as weaker magnets were placed external to the tube to steer the nanorobot towards the plaque.
A stopwatch and a ruler were used to measure time and distance. Time was measured in seconds, and distance was measured in cm. The mean time and standard deviation and median time was measured. All experiments were performed at a room temperature of 20 degrees Celsius. Before the actual experiment, test runs were conducted to practice the mechanical manipulation of the nanorobot.
EFFECT OF MAGNETIC STRENGTH ON NANOROBOT STEERING TIME
Magnets of 50 Gauss, 90 Gauss, 2 x 90 Gauss and 3 x 90 Gauss, as well as weaker magnets were placed external to the tube to steer the nanorobot towards the plaque. With each magnetic strength, the time that it took to steer the nanorobot to the plaque was measured seven times. The mean time and standard deviation and median time was measured. The effect of magnetic strength was investigated using air as the baseline medium. The data was graphed.
EFFECT OF MAGNET DISTANCE ON NANOROBOT STEERING TIME
A standard 90 Gauss magnet was used to steer the nanorobot to the plaque at distances of 0 cm, 2 cm, 4 cm, and 6 cm from the tube. For each distance, the time that it took to steer the nanorobot to the plaque was measured seven times. The mean time and standard deviation and median time was measured. The data was graphed.
The effect of magnetic strength was investigated using apple juice as the medium. Of the 4 fluids that were used in this experiment, the viscosity of apple juice most closely approximates that of blood.
EFFECT OF FLUID VISCOSITY ON NANOROBOT STEERING TIME
A standard 90 Gauss magnet was used to steer the nanorobot to the plaque in different media including air, water, apple juice, dish soap, and laundry detergent. With each medium, the time that it took to steer the nanorobot to the plaque was measured seven times. The mean time and standard deviation and median time was measured. The data was graphed.
Observations
OBSERVATIONS AND RESULTS:
EFFECT OF MAGNETIC STRENGTH ON NANOROBOT STEERING TIME
Small magnets with weak magnetic fields including small horseshoe magnets, small ceramic disc magnets, and small bar magnets were used to try and steer the nanorobot. In all of these instances, there was a failure to steer the nanorobot.
1) When a magnet of 50 Gauss was used, the mean time to steer the nanorobot from the starting point to the plaque was 24.41s. The median time was 24.28 s.
2) When a magnet of 90 Gauss was used, the mean time to steer the nanorobot from the starting point to the plaque was 8.49 s. The median time was 8.55 s.
3) When two 90 Gauss magnets were used, the mean time to steer the nanorobot from the starting point to the plaque 6.65 s. The median time was 6.56 s.
4) When three 90 Gauss magnets were used, the mean time to steer the nanorobot from the starting point to the plaque was 3.77 s. The median time was 3.59 s.

 EFFECT OF MAGNET DISTANCE ON NANOROBOT STEERING TIME
In all the trial used to measure the effect of distance, a 90 Gauss magnet was used to standardize the strength of the magnetic field. We chose apple juice as the medium for this set of experiments since its viscosity most closely approximated that of blood.
1) When a 90 Gauss magnet was placed on the surface of the tube, the mean time taken to steer the nanorobot to the plaque was 16.2 seconds and the median was 16.1 seconds.
6) When a 90 Gauss magnet was placed two centimeters away from the tube, the mean time taken to steer the nanorobot to the plaque was 18.8 seconds and the median was 19.5 seconds.
8) When a 90 Gauss magnet was placed four centimeters away from the tube, the mean time taken to steer the nanorobot to the plaque was 16.2 seconds and the median was 16.1 seconds.
9) When a 90 Gauss magnet was placed six centimeters away from the tube, it was not possible to steer the nanorobot to the plaque.
EFFECT OF MAGNET DISTANCE ON NANOROBOT STEERING TIME
In all the trial used to measure the effect of distance, a 90 Gauss magnet was used to standardize the strength of the magnetic field. We chose apple juice as the medium for this set of experiments since its viscosity most closely approximated that of blood.
1) When a 90 Gauss magnet was placed on the surface of the tube, the mean time taken to steer the nanorobot to the plaque was 16.2 seconds and the median was 16.1 seconds.
6) When a 90 Gauss magnet was placed two centimeters away from the tube, the mean time taken to steer the nanorobot to the plaque was 18.8 seconds and the median was 19.5 seconds.
8) When a 90 Gauss magnet was placed four centimeters away from the tube, the mean time taken to steer the nanorobot to the plaque was 16.2 seconds and the median was 16.1 seconds.
9) When a 90 Gauss magnet was placed six centimeters away from the tube, it was not possible to steer the nanorobot to the plaque.

 EFFECT OF FLUID VISCOSITY ON NANOROBOT STEERING TIME
1) Air: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 8.49 and 8.55 seconds respectively.
2) Water: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 13.8 and 14.34 seconds respectively.
3) Apple juice: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 16.2 and 16.11 seconds respectively.
4) Dish Soap: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 18.49 and 18.03 seconds respectively.
5) Laundry detergent: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 24.43 and 24.37 seconds respectively.
EFFECT OF FLUID VISCOSITY ON NANOROBOT STEERING TIME
1) Air: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 8.49 and 8.55 seconds respectively.
2) Water: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 13.8 and 14.34 seconds respectively.
3) Apple juice: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 16.2 and 16.11 seconds respectively.
4) Dish Soap: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 18.49 and 18.03 seconds respectively.
5) Laundry detergent: Using a 90 Gauss magnet, the mean and median times to steer the nanorobot were 24.43 and 24.37 seconds respectively.


Analysis
ANALYSIS
EFFECT OF MAGNETIC STRENGTH ON NANOROBOT STEERING TIME
When we used weak magnets, it was not possible to steer the nanorobot towards the plaque. It is very likely that the weak magnetic field generated by these small magnets across a thick PVC tube was insufficient to mechanically manipulate the nanorobot.
The progressive reduction in steering times with an increase in the strength of the magnetic field from 50 Gauss to 3 x 90 Gauss clearly proves that magnetic field strength is inversely proportional to the time taken to steer the nanorobot. This proves our first null hypothesis.
EFFECT OF MAGNET DISTANCE ON NANOROBOT STEERING TIME
Our experiments clearly showed that as the distance between the magnet and the tube increased, the time taken to steer the nanorobot also increased. This is explained by a progressive reduction in the strength of the magnetic field as the magnet moved away from the tube. This proves our second null hypothesis. At a distance of 6 cm, it was not possible to steer the nanorobot. It is possible that the magnetic field was too weak to move the nano robot, when the magnet was 6 centimeters away from the tube.
EFFECT OF FLUID VISCOSITY ON NANOROBOT STEERING TIME
The experiment was performed at a room temperature of 20 degrees Celsius. At this temperature, water has a viscosity of 1.002 mPa.s, dish soap has a viscosity of approximately 450 mPa.s, apple juice has a viscosity of 2.401 mPa.s, and laundry detergent has a viscosity of approximately 650 mPa.s.
Our experiment showed that the time that it took to steer the nanorobot increased as the viscosity of the fluid increased. Therefore, the steering time of a nanorobot is directly proportional to the viscosity of the fluid. This proves our third null hypothesis.
Conclusion
CONCLUSIONS:
1) The experiment demonstrated that it is possible to magnetically steer a nanorobot through a tubular structure towards a simulated plaque. Using magnetic fields of different strengths, fluids of different viscosities, and at different distances between the magnet and the nano robot. There are however limits to the strength of the magnetic field as well as distance from the tube, beyond which it was not possible to steer the robot.
2) The strength of the magnetic field is inversely related to the time taken to steer the nanorobot from origin to plaque.
3) For a magnetic field of fixed strength, the distance between the magnet and the tube is directly proportional to the time taken to steer the nanorobot.
4) The viscosity of the fluid is directly proportional to the time taken to steer the nanorobot.
The model supports the hypothesis that a magnetic force can guide a simulated nanorobot through a fluid-filled tube to reach plaque using external magnetic fields. It supports the premise that in future, real nanorobots could be magnetically steered inside blood vessels to help clear blockages or deliver medicine directly to plaque.
Application
APPLICATION:
- Breaking down atherosclerotic plaques in the coronary arteries to reduce the risk of myocardial infarctions
- Reducing plaque burden in the aorta and the carotid arteries to reduce stroke risk
- Restoring and improving blood flow
- Targeted drug delivery to plaques
Sources Of Error
SOURCES OF ERROR:
We used a large-scale model.
Real nanobots are exceedingly small.
Nanorobots are still experimental.
Blood is a non-Newtonian fluid and pulsatile.
Magnetic control inside the body is more difficult than in a model.
Human arteries are flexible, curved, and biologically complex.
Possible measurement errors
Citations
CITATIONS:
1) Bilal H, Aslam MS, Gul A et al: Optimized Tri-Coil Magnetic Guidance of Nanorobots for Targeted Plaque Therapy in the Middle Cerebral Artery. IEEE Trans Nanobioscience. 2026 Jan;25(1):127-139.
2) Zong Q, He C, Long B, Huang Q et al: Targeted Delivery of Nanoparticles to Blood Vessels for the Treatment of Atherosclerosis. Biomedicines. 2024 Jul 6;12(7):1504.
3) McDowell G, Slevin M, Krupinski J. Nanotechnology for the treatment of coronary in stent restenosis: a clinical perspective. Vasc Cell. 2011 Apr 18;3(1):8.
4) Dhanasekara CS, Zhang J, Nie S, et al: Nanoparticles target intimal macrophages in atherosclerotic lesions. Nanomedicine. 2021 Feb; 32:102346.
Acknowledgement
ACKNOWLEDGEMENT:
We acknowledge the contributions of the clinicians who provided us with the materials such as the tubing models and the magnets to conduct these experiments.