
Modular VTOL Drone for Multi-delivery Operations
Jaden Sidhu
James Fowler High School
Grade 11
Presentation
No video provided
Problem
Reusable Methods of Long-Range Delivery
How I Found out about the Problem:
Just to provide some context, this all started way back at the end of 2024 during December, after watching a Mark Rober video where I discovered Rwanda's drone delivery system for their hospitals from the company Zipline. Zipline allowed hospitals in Rwanda to transport important substances and materials like antidotes and much more from one location to another at instant. This made me curious, and a deeper dive into Zipline's system occured and there I found two big underlying issues. The packages themselves are dropped from in flight at high velocities, and the parachutes on the dropped packages, respectively, are really terribly small and weak, barely causing any drag to make the impact way lower with the ground. The second issue I found was the drones themselves and how unreliable and weak in structure they were. This is where the idea of a VTOL drone came into play and how the ideation of this project began.

The Company:
The company that operates the drone delivery service in Rwanda is Zipline. Zipline offers drone delivery services for medical needs such as blood delivery, vacine delivery, and many more medical supplies. Zipline had started in Rwanda, but since then has expanded to other nations such as Nigeria, Ghana, Kenya, Côte d'Ivoire, Japan, and the United States.

The Problem Zipline is trying to solve:
Roads and infrastructure, such as bridges, are not very modernized and this leads to terrible roads conditions, making it harder for hospital transport vehicles to transfer blood. When hospital transport vehicles do end up making it to their destination, they usually end up with blood spills and leaks due to the rough terrain and with these terrible conditions, maternal mortality rates increase significantly. With Zipline's drone delivery system approach, they can reduce these maternal mortality rates and ensure the survival of many individuals in Rwanda and all the other countries Zipline operates in.

Zipline's Drone Functionality Pros/Cons:
Zipline uses a fixed-wing aircraft body to transport medical vehicles over vast ranges. To drop the supplies off, Zipline drones use a comparment on the underside of the drone which actuates using servos to open up and drop the package from a height and return to base. To make sure their package contents are safe from the drop, they are covered in a large amount of bubble wrap or some absorbing material, and the packaging box itself has a small parachute attached to it. This does not always work as many malfunctions can occur, such as the parachute catching onto the actuating doors or the package contents being destroyed. Another big limitation is the wasted space by the packaging, absorption material, and parachute, which could have been used towards more space for even larger medical materials or substances, such as litres of artificial blood/natural blood or even expanding the capabilities towards transplants of organs so that various organs could be placed inside. A good system that Zipline uses is a catapult to launch their drones in the sky in seconds, allowing the operation of multiple drones simultaneously and seamlessly allowing for multiple operations to commence at once.

Zipline's Expansion of Other Operations:
Zipline's expansion to other nations led to the rise of different issues and situations it had to solve in each individual nation, as each nation has their own pros and cons. The nation I chose as a demonstration is the United States, since they are a well developed nation very much different than that of Rwanda. Zipline's main intiative in the United States was certainly not a niche one, as it was based on the delivery of many different items or as one would say, a regular delivery courier. A big challenge Zipline drones faced in the United States was the population of buildings in large cities like New York City and many others. These buildings limit the landing locations for dropping packages and so this sent them to the drawing board. Zipline's idea of VTOL drones took place, allowing for the landing and placement of products with vertical flying systems that are similar of a FPV drone and the fixed wing aircraft range withits large wings. A big downside with this systems is the amount of failure points, mainly being the 4 servos needed to rotate motors to switch between VTOL and fixed wing flight, meaning there are more areas where issues and defects can arise. Another issue is that their VTOL mode is very inefficient as when moving vertically, the large surface area of the wings heavily increases the drag they experience, making it very slow, have dirty air, and overall just inefficient.
Pterodynamics VTOL Transwing UAV

Research:
After some deep research into the types of aircraft that can preserve the range of a fixed-wing aircraft and contain some sort of VTOL capability, I stumbled upon the US military's V22 Osprey, which has been in service since March 19, 1989. This set me on a path of looking at different VTOL concepts, and here is where I found the company Pterodynamics. They specialize in drone manufacturing mainly for governmental use, and their VTOL Transwing UAV had particularly caught my eye as it was not something you would find everyday. The take the traditional concept of a 4 engine aircraft but had added hinge points on the wings so that it could actuate and rotate the wings backwards while turned 90 degrees so that the 4 engines point upwards in a drone motor configuration.

VTOL Transwing UAV (Unmanned Aerial Vehicle):
The VTOL Transwing UAV achieves this drone configuration with the motors, allowing the UAV to then vertically fly like a drone, maintaining stability and control that a VTOL aircraft like the V22 Osprey cannot achieve. The Pterodynamics Transwing UAV uses a push and pull rod system using linear actuators, which I have mimicked on my drone. Please note that Pterodynamics intends to use this drone for military use, whereas I intend to use this for humanities situations like quick and safe transport of transplant organs between hospitals and buildings. This push and pull rod system pushes and pulls on the main wings, allowing the aircraft to transition from fixed wing flight to VTOL flight.
Design Objective
Continuing in the process after researching VTOL designs for delivery drones, the project aims to create a configuration of VTOL aircraft specialising in optimised modularity for any or all missions requiring delivery to locations, whether hostile and dangerous or not. The idea is to innovate on a current VTOL drone design and set it up for missions requiring payloads of large size like organs for tranpslants at hospitals. An enlarged wing area would help with carrying heavier loads while in the fixed wing configuration, but could also interfere with weight balancing, requiring trials of different weights, especially as regular PLA becomes an issue already. Some aerodynamic refinements, such as extending the length of the V-tail to make the control surfaces have more authority and creating some split-scimitar winglets, can help make flights for trips more efficient. To be able to carry large items such as organs, the body of the VTOL drone will mimic something that of the Transwing VTOL UAV by Pterodynamics. Overall, this will be a design innovation project with the main goal/aim to make the most efficient and controlled VTOL drone for operations by integrating it with some aerodynamic channges while keeping a proven VTOL actuation system.
Hypothesis:
If a VTOL drone is further innovated and redesigned for modular payloads by enlarging the fuselage, expanding wing surface area along with control surface area, and introducing split-scimitar winglets, then the VTOL drone will be able to efficiently fly with stability while also having the strength and capacity to carry heavier payloads because the split-scimitar winglets help efficiency in flight and larger control surfaces would maintain stability in flight when dealing with heavy loads.
Method
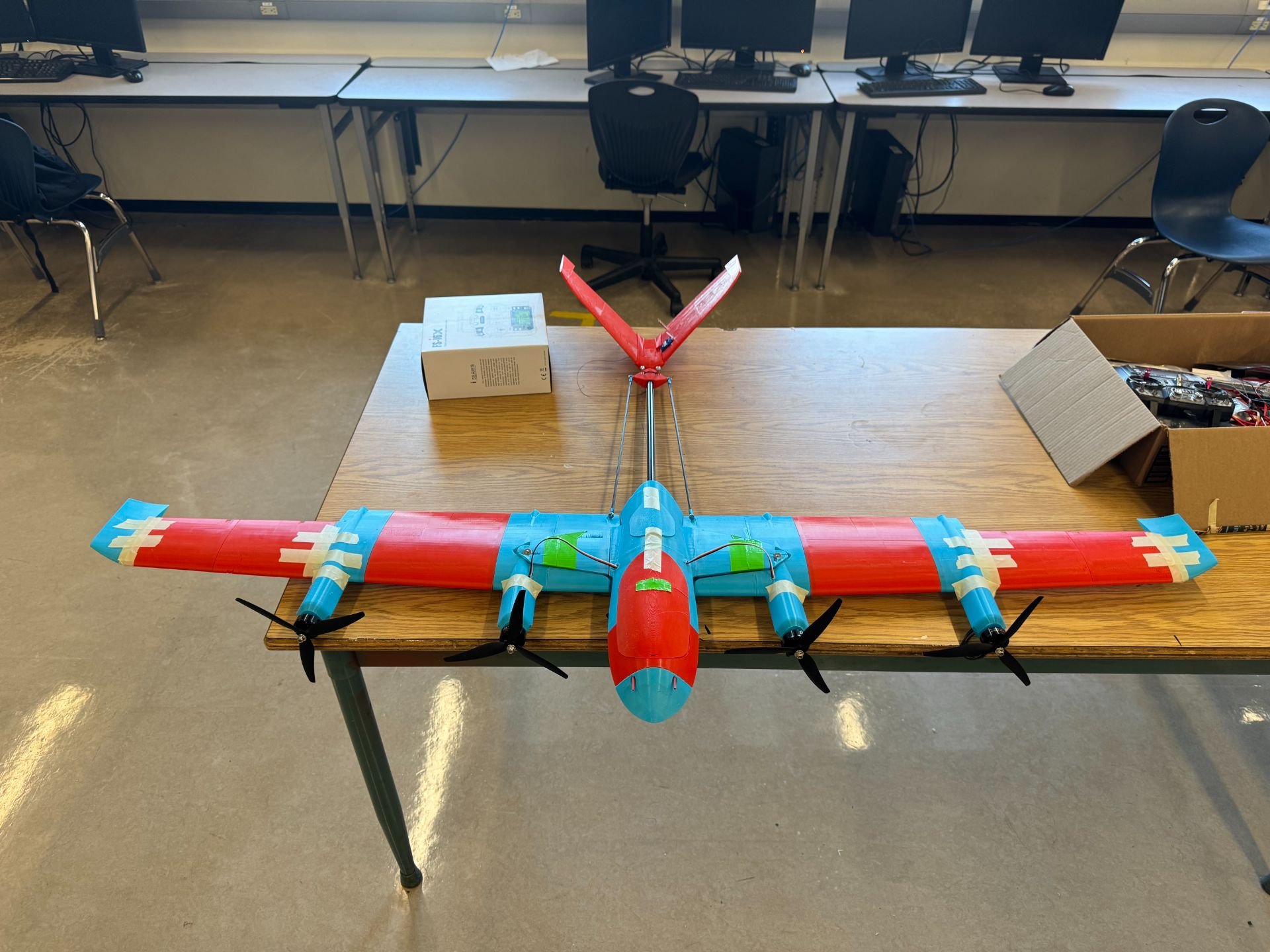
Modular VTOL Drone Features and Functions
Concise Summary:
The drone I am working on is an innovative project and will be using the design innovation to build on ideas from others through research and ideas generated by me and my extensive knowledge of aircraft and aviation systems. The drone uses this push/pull system too, but instead of internally pushing and pulling the rods to move the wings using linear actuators, my drone uses the carbon tube, which attaches the body and V-tail as a guiding rail for a shuttle that slides along the carbon tube. Attached to this shuttle are two smaller carbon tubes, which attach to the wings that push and pull on the main wings. A difference between the main wings on my drone compared to the Pterodynamics drone is that the wing area is larger to accommodate heavier loads, and wingtips have been changed to be more efficient by creating cleaner air, which reduces drag using the split-scimitar winglets designed and developed by the Aviation Partners Boeing (APB).
The Main Wing:
The first feature I decided to incorporate was the expansion of the main wings, and in doing so, I could increase the amount of lift the drone generates. Doing this increase in lift allows the drone to lift heavier loads and take more important supplies. More lift also means the drone will require less power to lift off from the ground, making it more efficient overall. This was inspired by aircraft such as the Transwing VTOL UAV and the Scaled Composites Model 351 Stratolaunch with its insane 117-meter wingspan, which is larger than a football field for reference. The Scaled Composites Model 351 Stratolaunch, also known as the Stratolaunch Roc, creates immense amounts of lift, making it able to sustain a Maximum Takeoff Weight (MTOW) of 1.3 million pounds.
The Improved Winglets:
After working on the improved wing expansion for more lift, the more immediately noticeable improvement I could make was the wing tips/winglets. The original design from Tim O'Brien on his Aerofold V2 used a slight curve at the wingtips, but it was not enough to eliminate vortexes that cause drag, and, from what I see was also for design aesthetics. In my modification, I made the angle of the winlet much more aggressive as well as a little longer, and this will be able to minimize vortex generation immensely. Another short mirror of the winglet is placed underneath, and this cancels further vortex generation underneath the plane, thus allowing further flight efficiency. This type of winglet is called the split-scimitar winglet and was designed and developed by Aviation Partners Boeing (APB). This design is most commonly seen on still in service beoing 737's as their main issue was the amount of efficiency lost during flight due to the short wingspan leading to higher pressures of vortex generation. The split-scimitar's aggressive profile makes vortex generation almost seamless.
The Enlarged Fuselage:
The enlargement of the fuselage happened to meet the mission criteria of being able to at least hold enough space to transport organs, and the design now mimics this using a similar fuselage body to the Transwing VTOL UAV that takes a type of rounded boxy shape. This ensures there is much space for all electronic systems aswell as space for transporting items. This new fuselage does come with drawbacks, such as increased drag due to its large profile when facing oncoming air, but other systems on the drone and new improvements counteract these drawbacks. This enlarged fuselage also allows space for a small PC fan to be placed inside to create a cooling environment for the electronics by exhausting it out the back. The new air that cools the system comes from a duct, which catches some oncoming air like something you would see on an automobile. The duct, also called the air intake, will mimic that of the F16 Fighting Falcon and use a split-line spine in the middle to keep airflow linear and smooth throughout the entire travel of the air intake.
The Expansion of Control Surfaces:
The expansion of control surfaces at the V-tail allows more air to be controlled mid-flight, allowing more authority on all roll, pitch, and yaw movements, allowing the aircraft to have more stability and control at heavier payloads. This is important as flying conditions are not always perfect and some missions are limited on time, requiring flight at a moment's notice. Winds and gusts fighting against the aircraft can make it offset heavily, leading to the possibility of the drone crashing, which is why it is very crucial to have these extended V-tails. The V-tail is based on the F-117 Nighthawk's tail portion, but with a less aggressive angle from above 50 degrees down to 45 degrees for the drone. The F-117 Nighthawk's V-tail is also slanted backwards for reduced radar signature, but for the drone, that won't be needed since this is not a stealth drone. The v-tail will be straight up with the slant in front for cutting air.

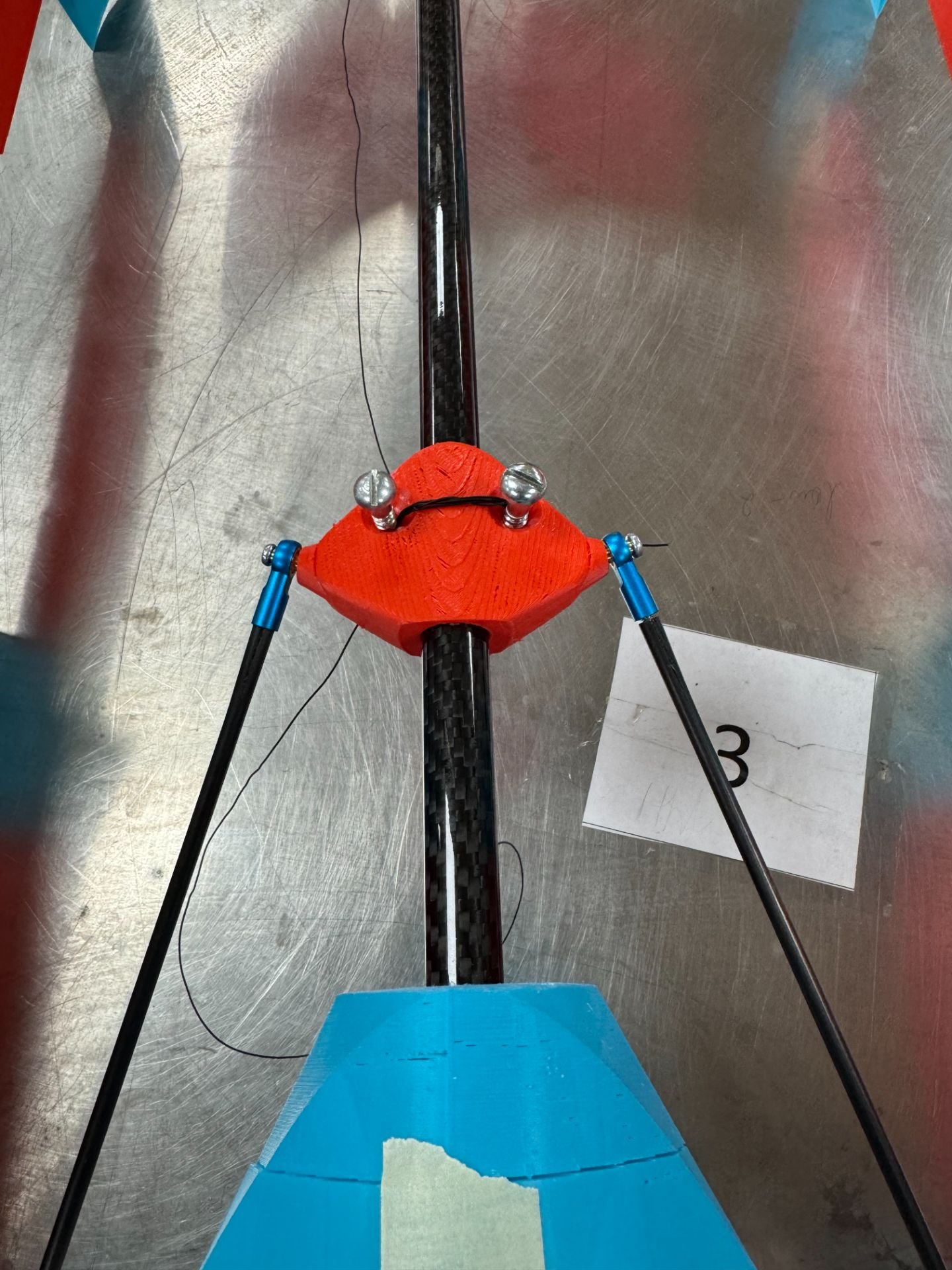
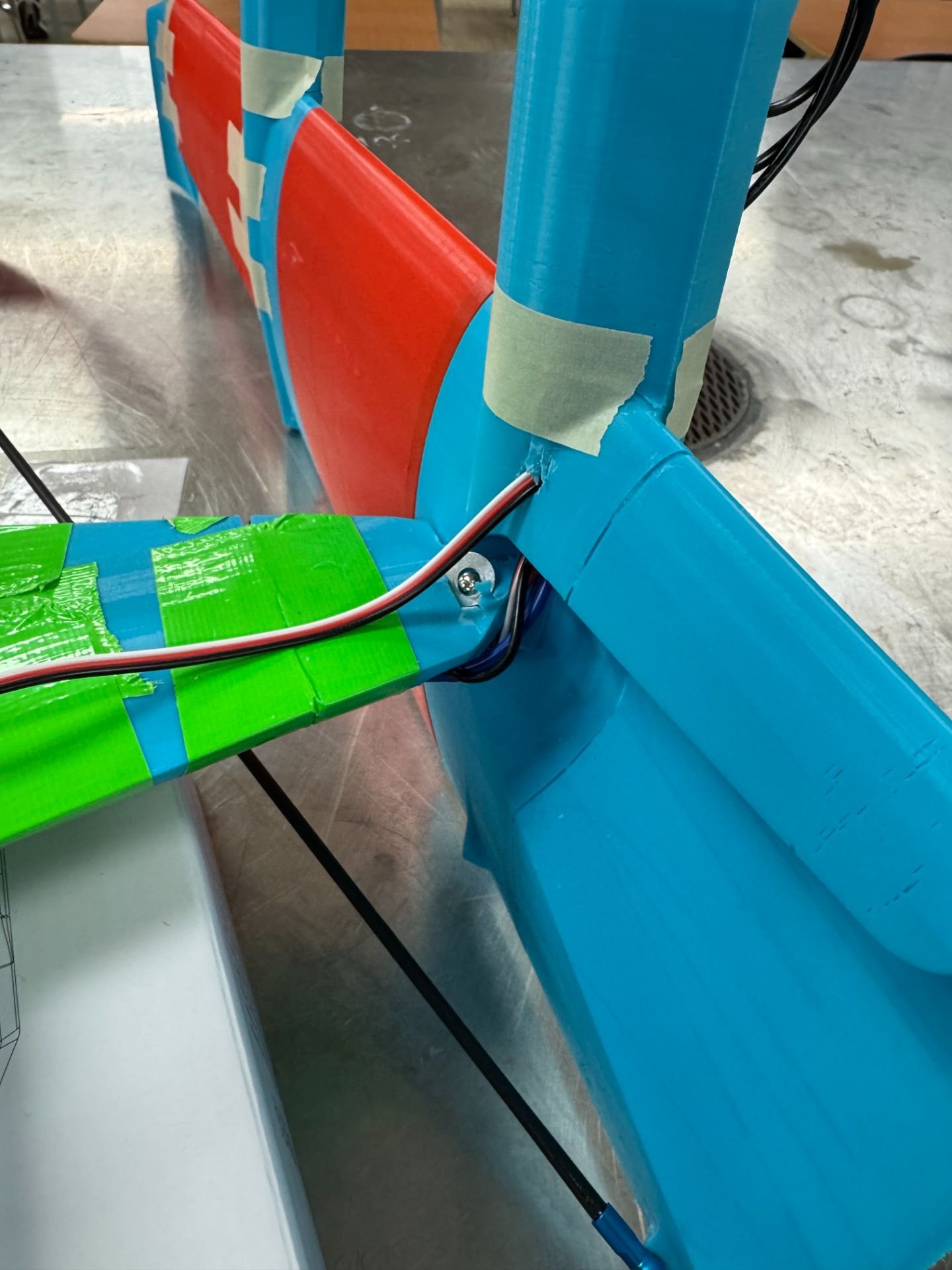
The Push/Pull Mechanism:
The Push/Pull mechanism I use on the VTOL drone is created by Tim O'Brien on his Aerofold V2 aircraft. The wing hinges at which the wings rotate are also used from the Aerofold V2 as a basis for me to build upon. The system works by using a push/pull system very similar to that of Pterodynamics' Transwing VTOL UAV, but instead of the mechanism using linear actuators internally, we use the carbon tube, which attaches the body and V-tail. On the carbon tube is a shuttle that can travel back and forth, and when attached to the wings using small carbon tubes, it pushes and pulls the wings to transition between fixed-wing and VTOL flight modes. This shuttle is moved by one singular servo, which acts as a winch that pulls on the string that attaches to the shuttle from the front and back. This keeps things simple and creates fewer points of failure, which is crucial for VTOL aircraft.
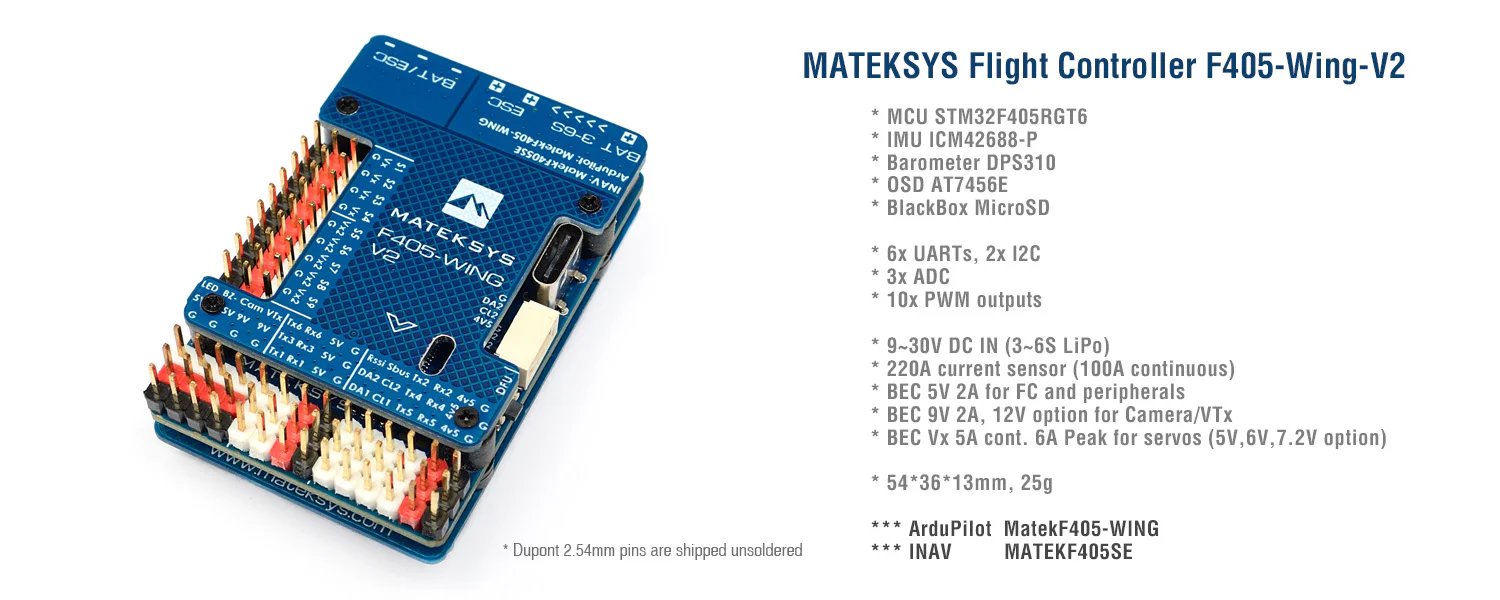
Electronics and Autopilot Navigation:
The drone will be using 4 FPV drone motors running at 1300kv, which is less power than usual, but with the trade-off for more efficiency and longer flight time. The original plan was to use an Arduino as the flight controller, but further investigation through research led to the conclusion that it would not be feasible since an autopilot requires many sensors like accelerometers, barometers, IMUs, etc. This massive list of sensors being bought separately would be a massive waste of time and money, both of which are crucial when working on a project this expansive and technical. Instead of using an Arduino and buying many other sensors to create an expensive list and waste time assembling, I opted to purchase a prebuilt flight controller. The flight controller I purchased and used for this VTOL drone was the Matek F405 WING V2 flight controller, which would support the many functions VTOL aircraft need, such as mine. This flight controller board is special since it supports a very particular flight software called INAV, which is meant for UAVs and allows for autonomous flight and in-flight stability in real time, which fits the drone's mission to pinpoint exact locations of takeoff and landing. Regular hobby servos, also known as SG90 servos, are used for control surfaces, as seen by many other remote control aircraft in the RC aviation community.
Analysis
Performance Impact of Fuselage Enlargement Analysis:
When enlarging the fuselage section to something similar to that of the Pterodynamics Transwing VTOL UAV's fuselage, a lot of changes occur, but the most demanding one is the profile section of the fuselage. This means more air runs against and slams onto the fuselage, and this creates a significant amount of drag. Other improvements counteract this drag, as will be discussed later on. To reduce the amount of drag this enlarged profile creates, we curve portions of the fuselage into a smooth sort of flow along which the air follows. This can be proven when you stick your hand out of a car while moving (please don't do this, if you already have, as a kid, then you can relate!). When our hand is in a vertical position, when moving through the air, we feel the air push back against it, but when we turn our hand into a horizontal position, the air gets sliced around the hand, and we feel less pressure from the air pushing back on our hand. The same concept applies to all aerodynamic features on many vehicles, like the VTOL drone. The enlargement of the fuselage now gives the drone the ability to carry organs such as a heart, and this was tested by using a large rubber ball that mimicked the size of a heart.
Split-Scimitar Winglet Modification Analysis:
Changing from the aethetic winglet previously to the new split-scimitar design, an efficiency increase of 3-5% is immediately guaranteed since vortex generation is heavily minimized from both the top and lower sections of the main wing. Eliminating vortex generation means the air that twirls up in a sort of mini tornado is disrupted, since vortex generation is most common on a flat, sharp edge, which is removed by adding angles and smoothing out objects. This efficiency conversion was further confirmed by my simulation on SimFlow of the original and new winglets, which consumed much time and power from my computer. Compared to the older winglets, split-scimitar winglets minimized these vortices by more than half when visually comparing them. Unfortunately
V-Tail and Control Surfaces Extension Analysis:
Extending the V-tail and its control surfaces has allowed the VTOL drone to have much more authority with its actions, meaning that if the drone wanted to roll, with larger control surfaces, it could do so much quicker. The same applies to any or all aileron movements (roll), elevator movements (pitch), and rudder movements (yaw). This happens because when our control surfaces are larger, more air gets push/forced against that surface, and it, in turn, pushes the aircraft in that spot with a higher force. The reason this needed to be incorporated was not for the speed of movement, but actually having movement happen when flying with a heavier load, since heavier objects require more force to push or move. Again, using the SimFlow CFD simulation software, I was able to notice a significant visual change in the amount of air now pushed by the new control surfaces. Once again, a visual increase of 10% more air was noticeable, and this confirmed that the new enlarged control surfaces and V-tail are doing their job.
Trade-Offs and Improvements Analysis:
The enlargement of the fuselage has increased the profile of the drone, resulting in drag, which is not ideal. Furthermore, we also have an increase in drag from the expansion of the V-tail since its profile is also increased. Changing the aethetic winglets into split-scimitar winglets has also increased the structural complexity of the drone, but it is not too big of an issue since I am using a 3D printer. The pros we can observe now are the increase of space within the fuselage for electronics, and most importantly, for the packages for any items the drone is delivering. The increased size of control surfaces now allows more control authority for the drone and makes transportation of heavier items easier. The new and improved winglets with the split-scimitar design increase the efficiency of the drone in flight, allowing it to make longer flights for larger missions. A small addition to be added is the Matek F405 WING V2 flight controller, which supports INAV software for autonomous flight.
Conclusion
Conclusion
The project was able to semi-successfully be able to demonstrate how the redesign of current VTOL aircraft and UAVs were able to support in the ideation and design of a VTOL drone for payload missions worldwide. This hypothesis is supported by the various successful simulations of the multiple changes of the enlargement of the fuselage, expansion of the V-tail and control surfaces, and the integration of a new design of winglets, which are the split-scimitar winglets, to help increase efficiency instead of being placed for aesthetics. These counteracted each other and led to no compromise of performance from the VTOL drone. Based on CFD simulations and structural analysis through Fusion 360, the hypothesis is heavily supported.
The enlarged fuselage made the VTOL drone able to carry out many different varieties of delivery missions, and the expansion of the V-tail and control surfaces allowed for more control authority while dealing with heavier masses of payloads. The change from the aesthetic winglets to the split-scimitar design allows the efficiency of the drone to be increased massively for fixed flight mode, and does this through the use of minimizing vortex generation. together these modifications introduce some sort of complexity but keep the VTOL drone stable and efficient during operational use.
In the future, working on componenets could be done through newer, more complex computational fluid dynamic softwares/simulations to ensure success of parts vefore they are even developed while aslo minimizing the structural complexity of parts through Fusion 360 to perfect the transition from VTOL to fixed wing flight while also creating an in between mode for very heavy payloads for short distances which could be lifted using a sort of carriage like how Zipline uses for their urban delivery service drone fleet. Overall, the design shows it has the capabilities to compete against harsh environments of limited time, hostile landing environments, and smoothness of flight to ensure fragile items are not destroyed for humanitarian missions. A cooling system like that of Transmedics could also be a future implementation when drone motor technology evolves to become stronger.
Citations
Citations:
Amukele, T., Ness, P. M., Tobian, A. A. R., Boyd, J., & Street, J. (2017). Drone transportation of blood products. American Journal of Clinical Pathology, 148(5), 1–5. https://doi.org/10.1093/ajcp/aqx092 Anderson, J. D. (2017). Introduction to flight (8th ed.). McGraw-Hill Education. Aviation Partners Boeing. (n.d.). Split scimitar winglets. https://www.aviationpartnersboeing.com Boeing. (n.d.). 737 performance and winglet technology. https://www.boeing.com Federal Aviation Administration. (n.d.). Unmanned aircraft systems (UAS). U.S. Department of Transportation. https://www.faa.gov INAV. (n.d.). INAV flight controller software. https://inavflight.com Matek Systems. (n.d.). F405-WING V2 flight controller specifications. https://www.mateksys.com NASA. (n.d.). Induced drag and wingtip vortices. https://www.nasa.gov O’Brien, T. (n.d.). Aerofold V2 [3D model]. MakerWorld. https://makerworld.com Pterodynamics. (n.d.). Transwing VTOL UAV. https://www.pterodynamics.com Scaled Composites. (n.d.). Model 351 Stratolaunch. https://scaled.com U.S. Air Force. (n.d.). F-117 Nighthawk fact sheet. https://www.af.mil U.S. Air Force. (n.d.). F-16 Fighting Falcon fact sheet. https://www.af.mil World Economic Forum. (2017). How drones are transforming healthcare delivery in Rwanda. https://www.weforum.org Zipline. (n.d.). Autonomous drone delivery. https://www.flyzipline.com
For information about the Pterodynamics Transwing UAV, I used some military media outlets like Defense News and Aviation Week.
Acknowledgement
The two individuals that helped me throughout this project were teachers and if not for them I wouldn't be able to compete!
The two teachers that helped massively are: Mrs Malhi - Helped with getting me into the Calgary Youth Science Fair. Mr. Nishiyama - Helped massively in part selelction for electronics and how to wire all components correctly.
Big thanks to my mom as well for funding this project entirely!