How do self driving cars work and how to make one
Grade 8
Presentation
Hypothesis
If we use Cardboard, metal, or concrete, then the car's speed will change.
Research
what is a self-driving car
It is a vehicle capable of navigating and driving without human intervention. It uses sensors, cameras, artificial intelligence (AI), and other technologies to perceive its environment, make decisions, and control the vehicle.
It has a lot of technology and it is a car that can drive by itself and it helps a lot of disabled people .
Some technology it has Equipped with sensors like LIDAR, radar, cameras, and ultrasonic detectors to detect surroundings.
Uses GPS and high-definition maps for navigation. It has a ultrasonic sensor and a lane tracing sensor and a camera.
how do self driving cars work
1. Sensors and Perception
Cameras: Provide visual data for detecting road signs, traffic signals, lane markings, and objects like pedestrians or vehicles.
Ultrasonic Sensors: Used for close-range detection, such as during parking or detecting nearby obstacles.
Lane tracking sensors the sensor will detect a yellow or a white line and will satay in that direction and if it has to turn then the car will detect the other yellow or white line then the will do the indicator and turn
2. Localization
GPS (Global Positioning System): For broad location tracking. In the board there is a tgmpu chip that is a gps for the car
what type of functions are they
Functions of a Self-Driving Car:
- Navigation: Plans routes and follows them.
- Obstacle Avoidance: Detects and avoids objects like pedestrians, other vehicles, and road hazards.
- Traffic Compliance: Adheres to traffic laws, road signs, and signals.
- Decision-Making: Makes real-time decisions on when to accelerate, brake, or turn
The sensors and the camera so when the person is sitting inside the car they can see where they are going. If the car is manufacturing there will be a button on the car that he can press the car will stop and the hazard light will be flashing. The people behind will know that the car is not working. They can go another way then a car from a dealership will come with a scanner to find any codes and the scanner will clear all of the codes and the car will be ready to drive if the codes to not clear then the car will be taken to the dealership. And the dealership will
Try to find the code.
Advantages part 1
1 The advantages are that i will help a lot of disabled people they have trouble going somewhere and some have doctor's appointment and some have to go to the hospital they can ask the car to take them to the place they what to go so they car will take them and they will not have to drive.
2
Environmental Benefits the car will be electric so it will have Fuel Efficiency: Optimized driving behavior (e.g., smooth acceleration, avoiding unnecessary stops) can save fuel and reduce emissions. And it will reduce fossil fuel
3
Emergency Response and Logistics
- Faster Emergency Services: self driving vehicles can quickly transport patients, goods, or supplies in emergencies.
- Disaster Relief: Self-driving technology can be used in hazardous or inaccessible areas for rescue or delivery missions.
4 Reduced Traffic Violations
Strict Adherence to Laws: Self-driving cars strictly follow traffic rules, reducing instances of speeding, illegal maneuvers, or reckless driving. Fewer Tickets and Fines: Reduced human driving errors mean fewer violations and associated costs.
Disadvantages part 1
- The cost it will cost a lot to buy the sensors will cost a lot of money the ultrasonic sensor is 80 to a 100 for small car for big it will cost 1000 to 1500 the lane tracking will cost 120 dollars the parts will take a lot time to come they will come from germany or usa or china it total estimate from me is more than 30 000 based on its model.And it will cost a lot of money to program the car.
- Technological Limitations Complex Scenarios: Self-driving cars may struggle with unpredictable or complex scenarios, such as construction zones, inclement weather, or unusual traffic situations. Sensor Failures: Reliance on sensors and cameras makes the system vulnerable to malfunctions or obstructions (e.g., dirt, snow, or fog).
- Edge Cases: Uncommon driving situations (e.g., encountering a sudden object on the road) can challenge AI systems.
Compare to a normal car self vs normal technology
Technology
Self-Driving Cars:
The have a lot have sensors the have the technology to drive by them self they use a lot of ai . they have ultrasonic sensors they have a camera for the person to see what the car is doing outside they have a very good software high-definition maps, and vehicle-to-everything (V2X) communication. What is a v2x communication it is V2X communication (Vehicle-to-Everything communication) is a technology that enables vehicles to communicate with various elements of their environment, such as other vehicles, infrastructure, pedestrians, and networks. It is designed to improve road safety, optimize traffic flow, and support self driving cars driving by enabling real-time data exchange.
Normal cars they have not a lot of technology they have some sensors the abs sensor the work it does ABS sensor (Anti-lock Braking System sensor), also known as a wheel speed sensor, is a critical component of a vehicle's anti-lock braking system (ABS). It monitors the rotational speed of each wheel and sends this data to the ABS control module to prevent wheel lock-up during braking.
normal car
Normal cars they have not a lot of technology they have some sensors the abs sensor the work it does ABS sensor (Anti-lock Braking System sensor), also known as a wheel speed sensor, is a critical component of a vehicle's anti-lock braking system (ABS). It monitors the rotational speed of each wheel and sends this data to the ABS control module to prevent wheel lock-up during braking. The normal cars also have blind spot sensor A blind spot sensor, also known as a blind spot monitoring (BSM) system, is a safety feature in modern vehicles that helps detect vehicles or objects in the driver's blind spots. These are the areas around a vehicle that are not visible through the side or rearview mirrors, which can pose a risk during lane changes or merging.
Self driving cars don't have this they have a lane tracking sensor it takes the lane they are turning into . They have more sensor .
Driving Control self vs normal part 1
- Self driving cars drive by them self they have the technology to drive by them self they can navigate, make decisions, and drive without human intervention (depending on the automation level).The driver is not always required to take control, particularly in higher levels of automation. The car has a driving control motherboard A driving control motherboard, also known as an Engine Control Unit (ECU) or Powertrain Control Module (PCM) in automotive terms, is a central electronic system in a vehicle responsible for managing various driving and operational functions. It acts as the "brain" of the vehicle, processing data from multiple sensors and controlling actuators to optimize performance, efficiency, and safety.
normal cars
Normal car they control with a person sitting in them Fully controlled by a human driver at all times.
The driver's skill, attention, and decision-making are critical. The thing that controls that is the the suspension and the axle the axle rotates the tier and the car drives the axle goes in tha hub and the hub goes in the tier and the engine the hub and the axle go together .
How does the axle move The movement of the axle in a vehicle is primarily driven by the engine and the transmission system, which work together to transfer power to the wheels. Power is Sent to the Differential From the transmission, the power travels through the driveshaft (in rear-wheel-drive or all-wheel-drive vehicles) or directly to the differential (in front-wheel-drive vehicles).
The tie rod helps the turn left and right A tie rod is a crucial component of a vehicle's steering system. It connects the steering rack or center link to the steering knuckle on each front wheel, helping to transmit steering input from the steering wheel to the wheels. There is 2 types of tire rod inner and outer .
benefits of self driving cars
The benefits of a self driving car is they help a lot of disabled people the people who don't know how to drive and this is going to be the feature and enhance safety it has a lot of environment benefits self-driving cars operate more efficiently, reducing fuel consumption and emissions. Emergency Response and Disaster Management AVs can assist emergency responders by quickly navigating to accident scenes or disaster zones. The car has a very good system of tracking obstacles and lane tracking sensor is very intelligence sensor
HOW TO BULID A SELF DRIVING CAR
The parts you need to build a self driving car and where you can get them
- four tires with motors heavy duty you can get them from temu
- A base for the car and h16 screws 5.5 boult and 3.3 boult from amazon
- A ultrasonic sensor and a lane tracking sensor from ebay
- You will need a breadboard and male duplicated wires
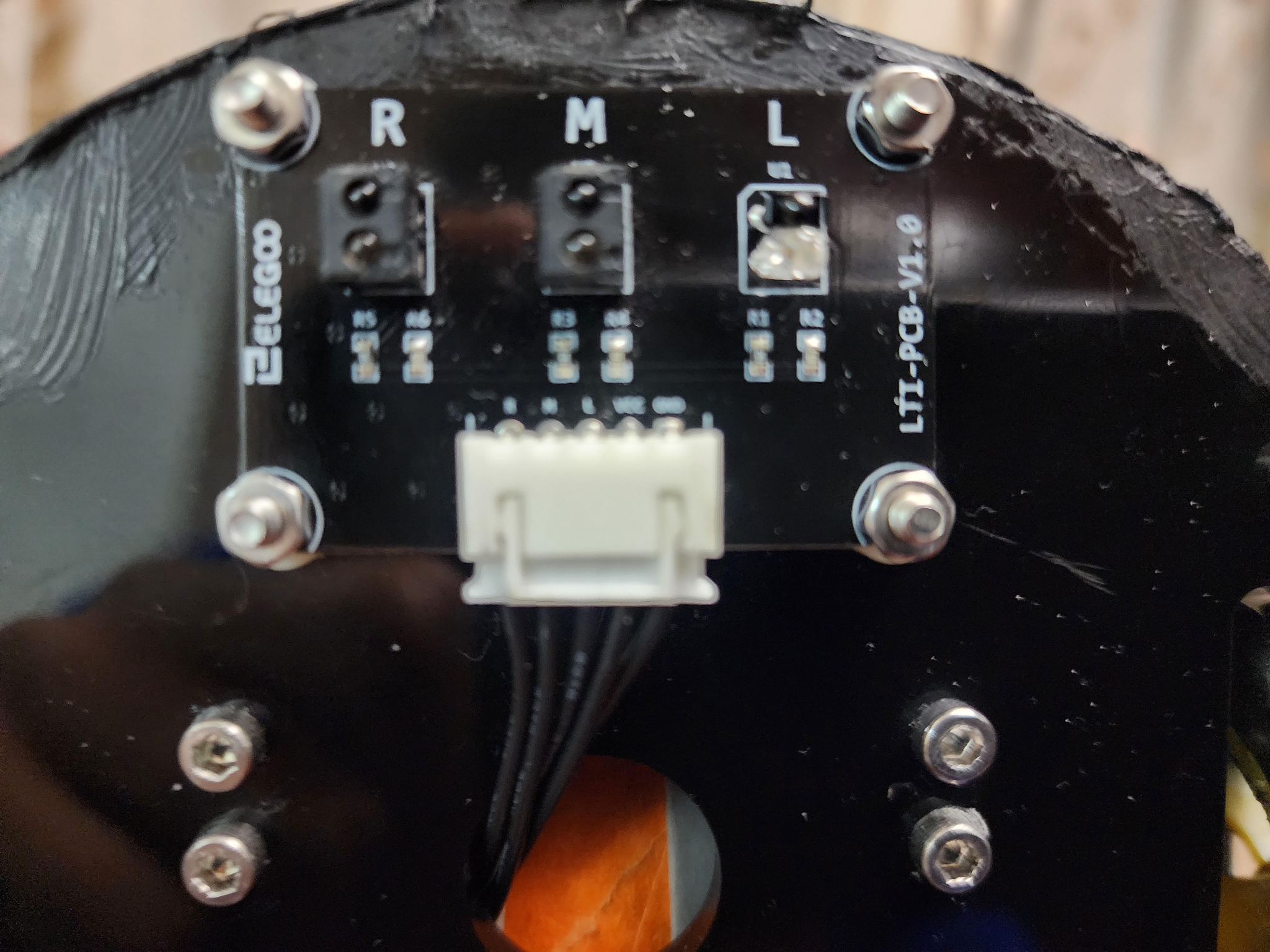
- Elegoo Motherboard
- Hot glue
- Cardboard
- paper clip
- Usb c
- A camera from elegoo
- A motor to spin the camera
- 4by 4 wires
- 3by 3 weirs
- And 2 by 2 connectors for wires
- And pra paint
What kind of sensors are they
- The sensors you need are a lane tracking sensor a ultrasonic sensor and elegoo camra
- The lane tracking sensor does it tracks the lane you are going in it will detect a black or a yellow line . the ultrasonic sensor does it detects any obstacles in front the sensor will move left and right every 5 seconds to see if there is anything in front it will turn. The camera will tell the person how the car is driving if there is something wrong the car will stop and turn on the hazard lights .
How to assemble the car steps 1 to 4
- Step 1 get the motors and strip the wire and use the 2by2 connectors put the wire in the contector you have to do this for evry moter you .
- Step 2 you have the get the base of the car and put the four mother by h16 nuts and 5.5 boults .
- Step 3 put the lane tracking sensor under the base of the car and put h 16 nutes and 3.3 boult .
- Step 4 get the tgpu chip and the elegoo other board and use the gold nut and h 16 boult to put it together.
steps 4 to 10
- Step 4 get the elegoo motherboard and the other mother board and connect them together .
- Step 5 connect the batter in the elegoo motherboard.
- Step 6 get the ultrasonic sensor and the camera and the camra plate put them together and the motor for the camera .
- Step 7 then is put the motors wire in elegoo motherboard the camera and the ultrasonic sensor
- Step 8 the led lights use the breadboard you need a battery pack connect positive and negative
- And just put where you what to put the lights .
- Then get some cardboard cut as the size of the car
- And spray paint it black or blue
problems when I was making the car
- I had problems with doing the programing the app was always lagging and was deleting the programing
- The sensor the small cap always getting of so i hat to put super glue
- The lights wire it kept on coming out of the bread board so that is why i put the male duplicated connectors
- and if there is more self driving maby the sensor will detect different cars not the one car .
HOW TO DO THE PROGRAMING
Step 1 go on your google play store or app store
Step 2 go on the app and press the elegoo smart robot
Step 3 then when you press the smart robot go on remot control
Step 4 turn on the car and go on your wifi
Step 5 connect you wife with elegoo database
Step 6 then you can see programing
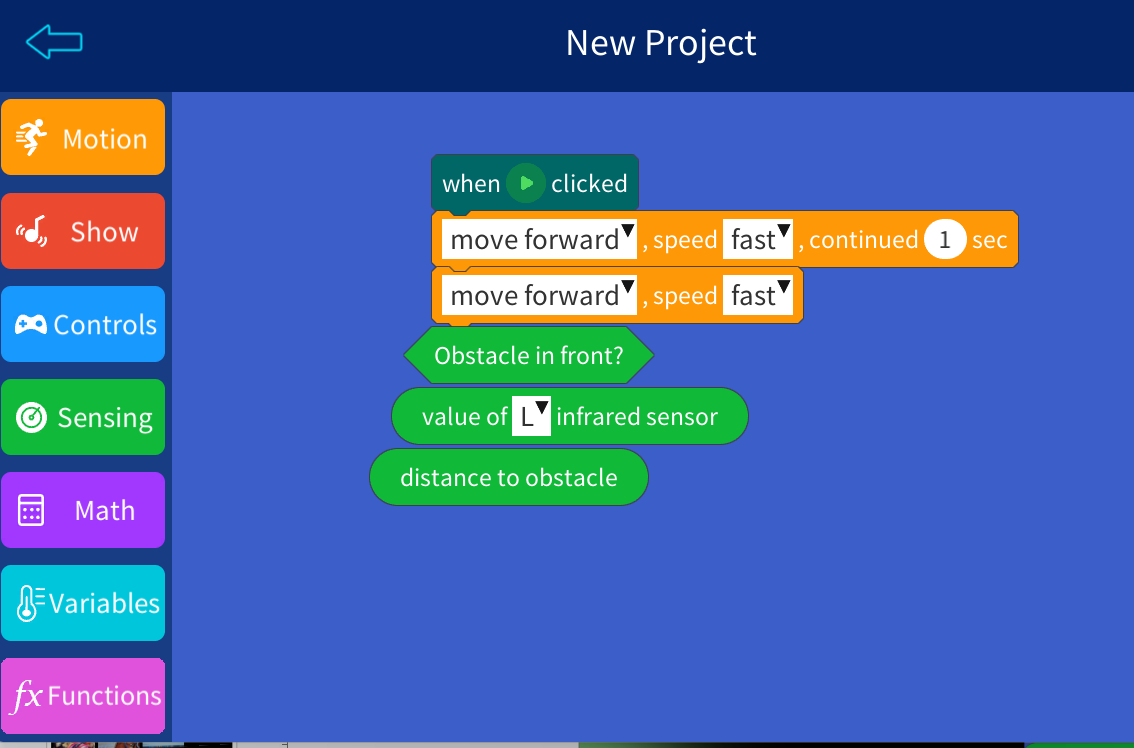
Step 7 go on that and click new project
Step 8 then i did motion move forward and backward for 5 seconds
Step 8 i did the lane tracking sensor to move
Step 9 the obstacle tracking and i used the elegoo programing
Step 10 then save your project .
Variables
- Independent variable different obstacles cardboard metal and concrete
- Dependent variable How long will it take the car to see the obstacles
- Constant variable the wires the battery the motors the lights the sensor
Problem Can self-driving cars effectively avoid accidents when navigating through various obstacles?
Procedure
Steps Step 1: put a big piece of cardboard metal or 2 bricks .
Spep 2 put the car in front of the obstacles a little bit far .
Step 3 turn on the car and the lights
Step 4 turn on the black button and make it go to the yellow light
Step 5 the car will detect the obstacles and move .
Step 6 then you will record the time
Observations
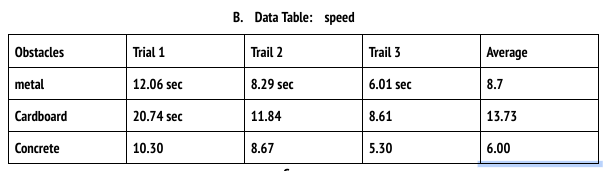
After the experiment the results were shocking the most time was cardboard
- Obstacle 1 metal trial 1 took 12.06 seconds to detect the obstacle and the final trail took 6.01 seconds the average for metal was 8.7 .
- Obstacle 2 cardboard l the first trial was 20.74 seconds the 3 trail was 8.61 and the average was 13.73 seconds.
- 3 obstacle was concrete 1 trial was 10.30 and the trial 3 5.30 and the average was 6.00
Analysis
So when I did the experiment for cardboard I thought it would not take less time but after it took a lot of time it took 13 seconds for the car to detect the car. I thought that concrete would take the most time and it took the least time 6 seconds . And for metal i thought i will take the medium time
But took medium time it was very good
Conclusion
The purpose for this experiment is that I wanted to see if my self-driving car can detect different obstacles and how long will it take for the car to detect the obstacles .
I am using 3 types of obstacles: metal cardboard and concrete .And this is very good with the obstacles.
And in case there is something coming in front of the car .
The car will detect the obstacle in the front and will turn .
And the car will turn and how long will it take and the time between them.
My hypothesis is that if we use Cardboard or metal or concrete then the car's speed will change .
So when I did the experiment for cardboard I thought it would not take less time but after it took a lot of time it took 13 seconds for the car to detect the car. I thought that concrete would take the most time and it took the least time 6 seconds . And for metal i thought i will take the medium time
But took medium time it was very good
Application
self-driving cars can be used it real world be driving them they can also be in construction machines and in other things also
Sources Of Error
there was a lot of stuff that was going wrong like when I was making the car the connectors for the wire were not going in go I had to solder them inside the connector and also when it was time to do the programming the car was on low battery and the programming will not go in the car that is all of the sources of error
Citations
Acknowledgement
I would like to thank Allah SWT for letting me go to the city science fair and my grade 8 and 1 grade 7 teachers mrs Khalil Mrs. Nambiar Mrs. Sadek Mrs. Bennacer Mrs. Aly and my dad Asad Mohammad and my uncles Ansar Faisal and my mom for letting me go this and ferye from elegoo and my dads and uncles shop Desi Grage and Desi auto body and my self Mohammad Aahil and my grandparents for making dua for me